Mise en place d'un projet Safety
Introduction et rappel sur la Safety
Un programme PLC permet de gérer des mouvements et tout une gamme de type d'entrées/sorties. Il tourne sur une PLC qui est connecté à une série de bornes I/O regroupées en groupe rattachés à un coupleur. Un réseau filaire type Ethernet relie le PLC et les coupleurs. Ce réseau est nommée EtherCAT, il a la particularité d'avoir une topologie linéaire à la différence d'Ethernet qui permet la connexion en étoile.
Le programme PLC effectue ce qu'on attend de lui: régulation, mesure, visualisation etc..
Un programme Safety sert uniquement a gérer les état d'urgence de manière à protéger la vie humaine en agissant sur l'arrêt de moteurs ou l'inhibition de mouvements par exemple.
Il faut noter que dans le cas de Euler la Safety sert également à protéger le telescope dont les moteurs d'azimut doivent etre stoppés en cas de problèmes avec la sustentation hydraulique.
Le programme Safety est exécuté sur un contrôleur Safety qui communique avec des bornes Safety spécialisées (entree/sortie digitales), reconnaissables à leur couleur jaune, ainsi qu'avec de cartes Safety enfichables pour les ampli moteurs.
La particularité du programme Safety est que son fonctionnement suit des règles de sécurité strictes qui, si elles ne sont pas respectées entrainent l'arrêt de la machinerie gérée. Par exemple, les erreurs de communication (perte, mauvaise checksum) sont gérées ainsi que les coups de poing défaillants, les relais collés etc, les décisions des bornes sont générées par deux processeurs indépendants et leurs résultats sont comparés. En cas d'erreur la Safety entre en fonction. Des bornes mal interchangées conduiront au même résultat.
La conception même du logiciel suit des règles, par exemple un coup de poing ne peut être connecté que sur une borne Safety de type digital input ou un Function Block Safety (TBC). Dans le meme ordre d'idée une porte AND ne peut avoir qu'un signal logiciel (provenant de la PLC), ses autres entrées venant nécessairement d'une borne Safety de type digital input ou d'un Function Block Safety.
Le programme Safety est créé sous forme graphique. Le programmeur insert des Functions Blocks spécialisées et les relies entre eux de manière à créer la logique Safety d'arrêt d'urgence. Chaque liens reliant les Fonctions Blocks ainsi les entrées/sorties vers le monde extérieur sont nommées signaux.
Fondamentalement un programme Safety n'a pas besoin du programme PLC. Par contre il utilise le télégramme EtherCAT pour communiquer entre les bornes Safety. Ainsi les bornes Safety sont physiquement connectés aux bornes standard et aux coupleurs standards, mais ne communiquent pas avec eux.
Toutefois, pour des raisons évidentes de monitoring ou choix dans le programme PLC il est possible de d'associer (mapping) les signaux du programme Safety aux variables de programme PLC.
Un exemple: enclencher un moteur se fait par le programme PLC qui envoie un signal sur la première borne AND de la Safety. La deuxième entree de cette porte AND est connectée à un Function Block de type EmergencyStop lui même connecté à une borne de type Safety Digital Input. La sortie de cette porte AND contrôle un relai au travers d'un borne safety digital output.
On peut également considérer que le programme Safety a un temps de développement court. Une fois le hardware figé et le mode d'arrêt de manière urgente également figé. Il n'y a (normallement) pas de raison de le modifier. Au contraire du programme PLC sur lequel, même avec un hardware figé il est absolument concevable de rajouter ou modifier des fonctionnalités.
Un projet Safety est donc un projet indépendant du projet PLC. Son hardware comporte un contrôleur Safety (EL6900), des bornes digitales entrée Safety (EL1904) et des bornes digitales sortie Safety (EL2904), des cartes Safety Moteur (AX5805). Pour la programmation avec TwinCAT 3, on utilise un jeu de commande et de developpement (graphique) dedies uniquement a la Safety.
Il est essentiel lors du montage des bornes Safety de leurs assigner une adresse garce au Dip-Switch situes sur le flan de la borne.
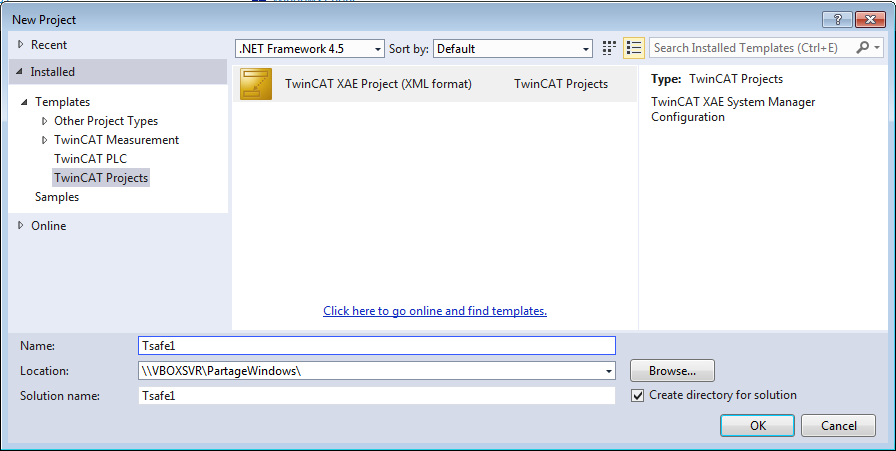
Le demarrage d'un projet suit le deroulement courant. TWC3->New_Project et on selectionne sous Templates->TwinCAT_projects TwinCAT XAE Project (XML format)
Dans le champ ou est inscrit <Local> on clique sur Choose Target System et on selectionne le PLC.
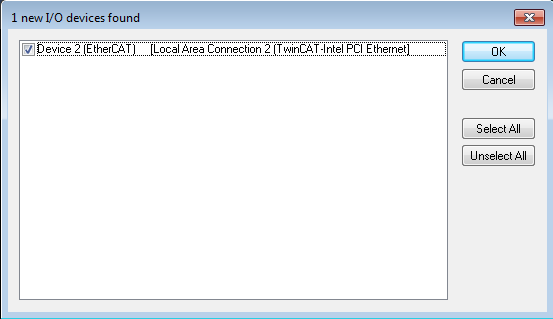
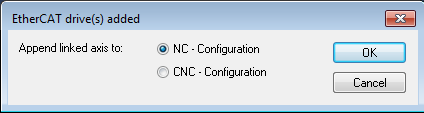
Selection de I/O->Devices et on lance le scan des bornes (menu contextuel), On confirme le device EtherCAT comme I/O device a scanner. Si un moteur est sur le reseau EtherCAT on accepte le scan des moteurs ainsi que l'ajout des Axes selon la configuration NC et finalement Activate Free Run.
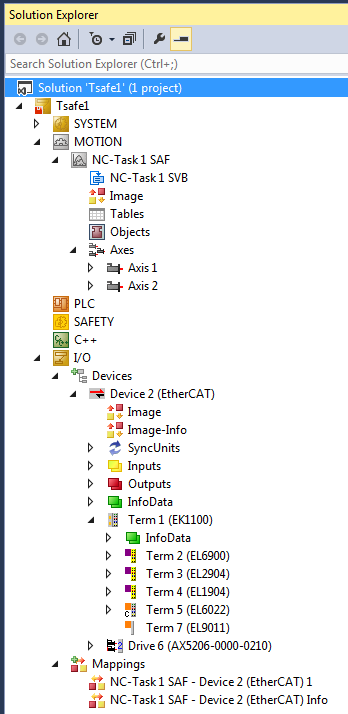
Apres cette operation les bornes standards et Safety ainsi que les moteur apparaissent sous I/O->Devices->Device_2_(EtherCAT) sous un coupleur (EK110x) ou sous Drive x.
De meme, les 2 axes du drive sont generes sous MOTION->NC-Task1_SAF->Axes->Axis_1 (et Axis_2)
Creation de la Safety
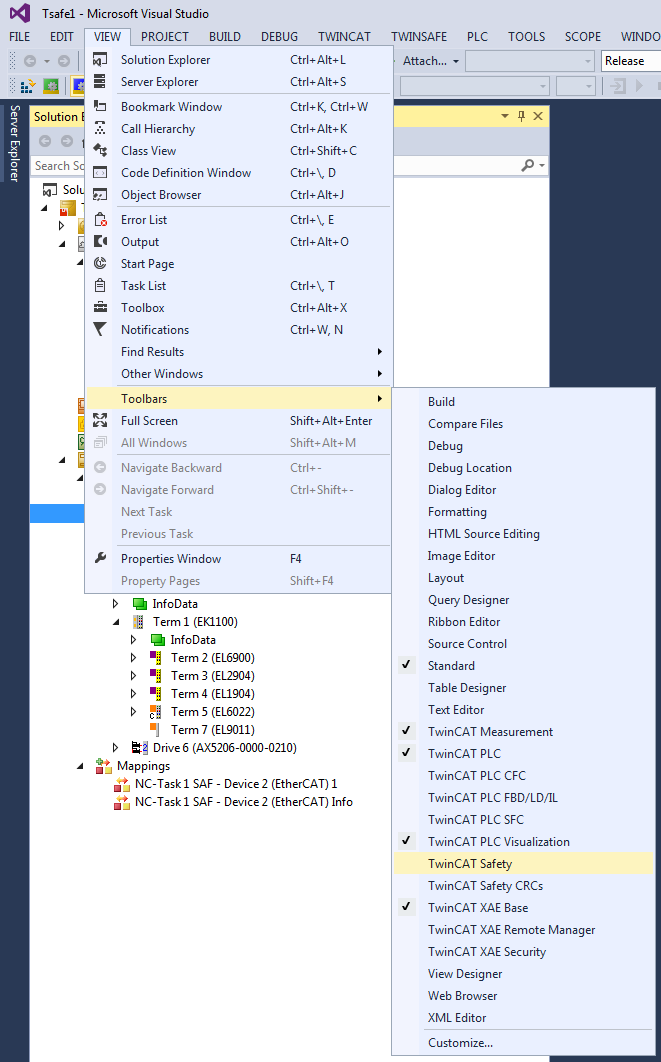
Une bonne idee est de rajouter les icone Safety dans le toobar avec TWC3->VIEW->Toobars->TwinCAT_Safety. les icones apparaissent grisees dans un premier temps.
SAFETY->Add_New_Item...->TwinCAT_safety_Project_Preconfigured_ErrAck et Name: MySafe -> Add
Cet ajout lance un TwinCAT_3_Safety_Wizard. On renseigne les 2 premiers champs avec Harware_Safety_PLC et Graphical Editor (unique choix d'ailleurs)
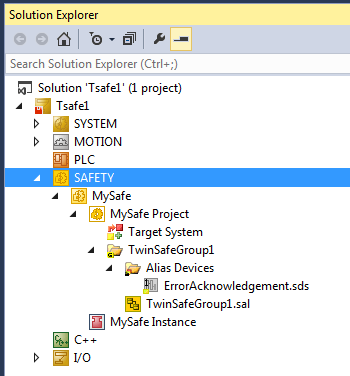
Le icones Safety sont maintenant disponibles lorsqu'on selectionne le projet (ici MySafe Project) et le Solution explorer contient maintenant les elements de base.
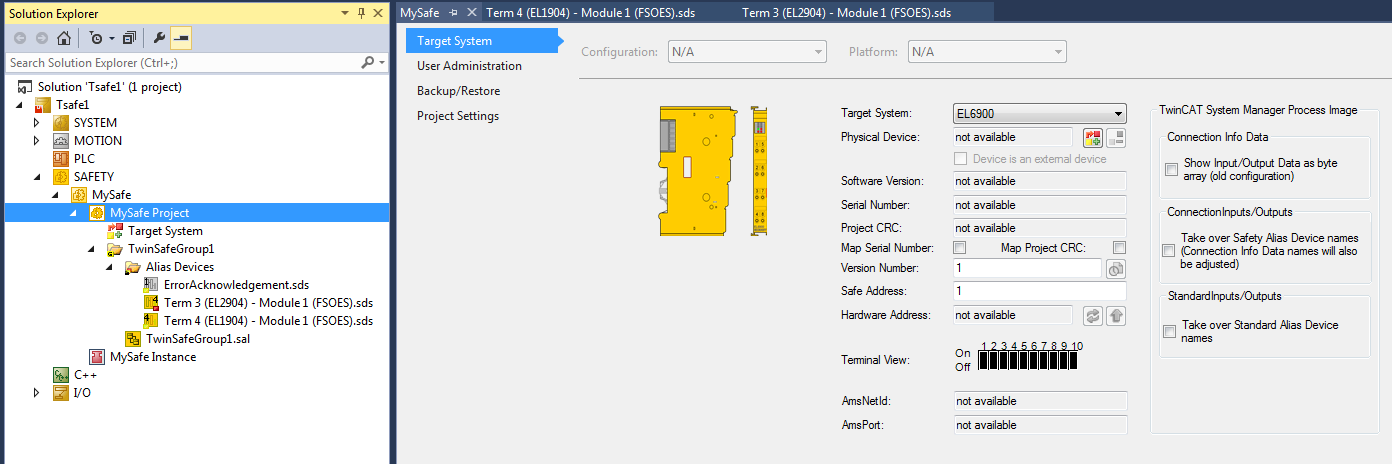
Definition du Target System
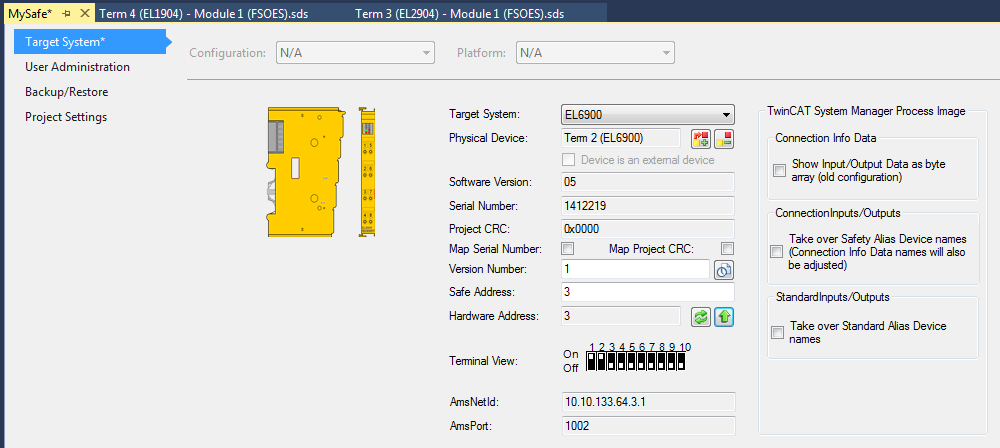
C'est la que l'on choisi la borne Master (EL6900). Pour cela: Selectionner Target System dans le projet safety.
Et cliquer sur l'icone

Pour selectionner le master:
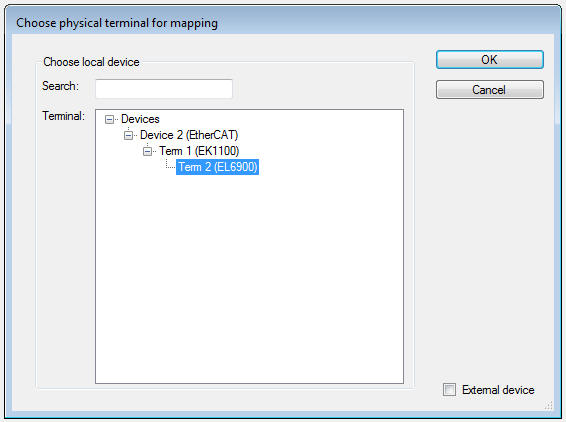
Ensuite on confirme le FSoE adresse en cliquant sur la fleche verte

On obtient au final:
Creation des Alias
Toutes les entrees/sorties non Safety, c'est a dire celles qui communiquent avec la PLC doivent etre creesdans le programme PLC ou GVL (Global Variable list).
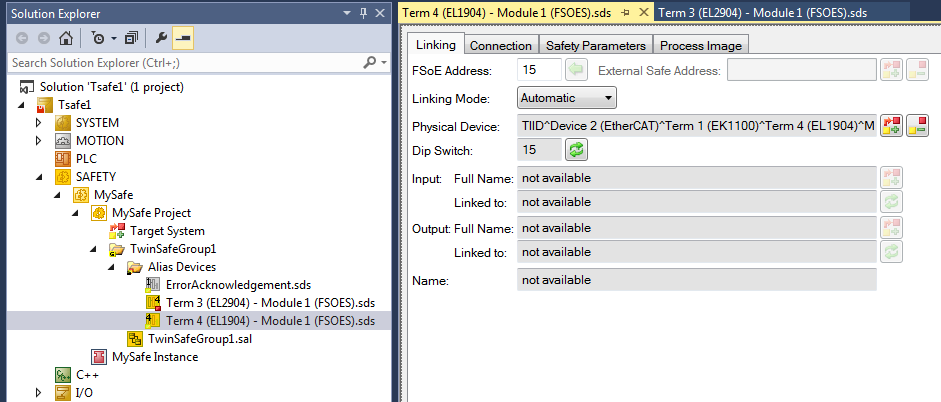
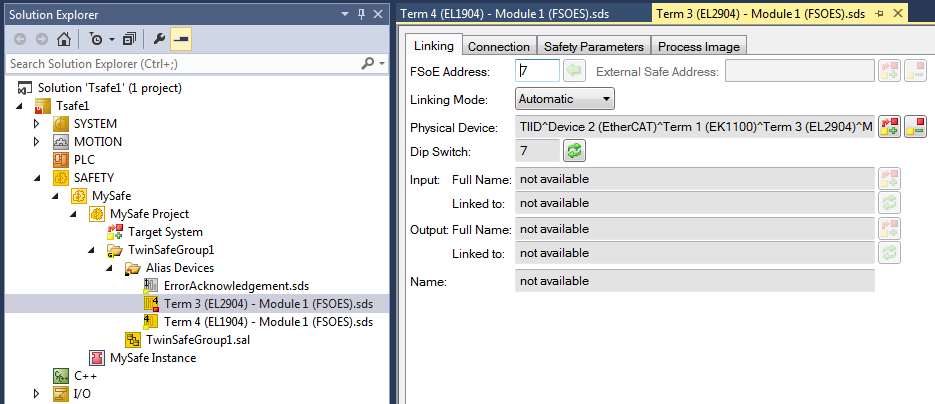
Pour les entrees/sorties Safety il faut creer un alias pour chaque terminal (et non pour chaque cannal sapare).
L'alias ErrorAcknowledgement est cree automatiquement lorsde la creation du projet safety (selon le choix de la template (voir plus haut)
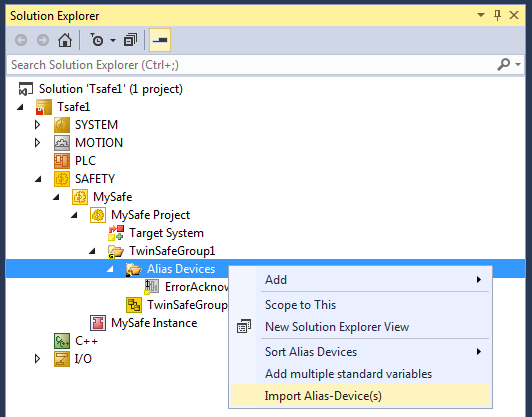
On import les alias-devices a disposition en selection Alias_Devices->Import_Alias-Devices(s), Select_All et OK.
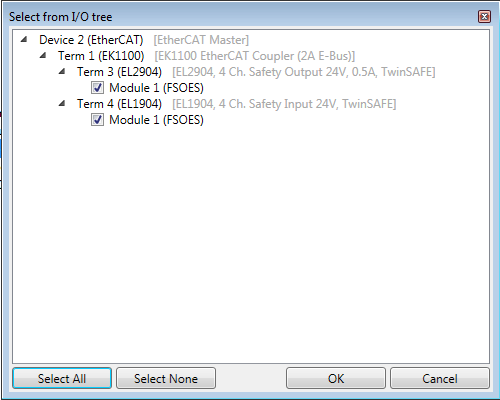
On obtient les references sur les module I/O Safety que l'on peut programmer (voir plus bas).
Ajout des signaux vers le programme PLC
Tout les signaux qui doivent communiquer avec le programme PLC sont a ajouter manuellement avec Alias_Devices->Add->New Item...
Creation du programme de test
PLC->Add_New_Item->Standard_PLC_Project...
Name = MyPlc
Creation des variable globales
PLC->MyPlc->MyPlc_Project->GVLs->Add_Global_variable_List...
Name = GVL
Creation du projet avec l'editeur graphique
On lance l'editeur graphique par un double-click sur l'icone TwinSafeGroup1.sal
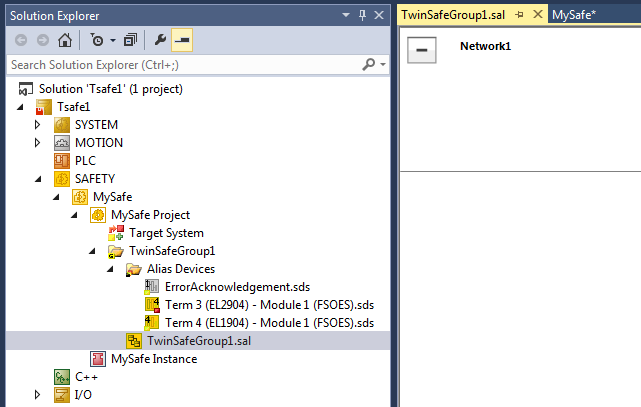
On se retouve dans Network1 qui est la premiere zone de travail. Ici commence l'insertion des fonctions block grace au Toolbox situe a droite de TWC3.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}